Cambio de Posición por las Posesiones de Agarrotamiento
Los
ángulos de los eslabones de entrada que corresponden a las posiciones de
agarrotamiento (configuraciones estacionarias) del mecanismo de triple balancín
de no Grashof se calculan con el siguiente método mediante trigonometría. La
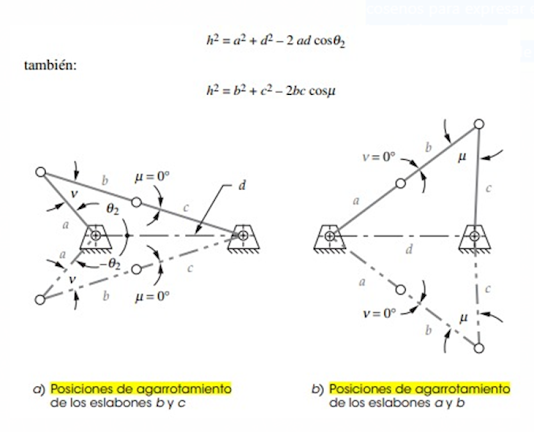
figura 4-17 muestra un mecanismo de cuatro barras de no Grashof en una posición
general. Se trazó una línea de construcción h entre los puntos A y O4.
Ésta
divide el lazo cuadrilateral en dos triángulos, O2AO4 y ABO4. La ecuación 4.31
utiliza la ley de cosenos para expresar el ángulo de transmisión m en función
de las longitudes de los eslabones y los ángulos del eslabón de entrada q2.

Para encontrar los valores del
ángulo de entrada q2 máximo y mínimo, se puede diferenciar la ecuación 4.31, al
derivar q2 con respecto a m e igualar a cero.
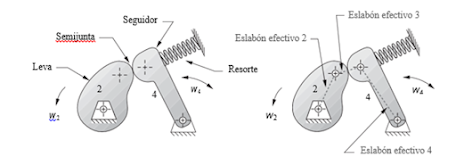
Las longitudes de los eslabones a, b, c, d
nunca son cero, de modo que esta expresión sólo puede ser cero cuando sen m es
cero. Esto será cierto cuando el ángulo m en la fi gura 4-17 es cero o 180°.
Esto es compatible con la definición de
agarrotamiento dada en la sección 3.3 (p. 90). Si m es cero o 180°, entonces
cos m será ±1. Al sustituir estos dos valores de cos m en la ecuación 4.31 se
obtendrá un valor de q2 entre cero y 180° el cual corresponde a la posición de
agarrotamiento de un mecanismo de triple balancín cuando es impulsado por un
balancín.

Uno de estos casos ± producirá
un argumento para la función arcoseno localizada entre ± 1. El ángulo de
agarrotamiento, el cual está en el primero y segundo cuadrantes, se calcula con
este valor.
El otro ángulo de
agarrotamiento será entonces el negativo del encontrado, debido a la simetría
de espejo de las dos posiciones de agarrotamiento en torno a la bancada, como
se muestra en la figura
El programa Fourbar calcula
los valores de estos ángulos de agarrotamiento en cualquier mecanismo de no
Grashof.

Comentarios
Publicar un comentario